
ก็เป็นธรรมเนียมครับ ช่วงเดือนกุมภาพันธ์ทุกๆปีจะมีบทความมาลงใน kns-engineering.com หนึ่งบทความในช่วงเดือนของการก่อตั้งของบริษัท ก็แสดงความยินดีกับผู้ร่วมก่อตั้งด้วยล้วนเป็นคนหนุ่มไฟแรง ก่อนจะไปกันต่อแนะนำตัวก่อน ผมชื่อประจวบ เรียบร้อย ปกติสามารถติดตามบล็อกผมได้ที่ priabroy.name
สำหรับงานทำแผนที่ด้วยภาพถ่ายทางอากาศ (Photogrammetry) สิ่งสำคัญที่สุดคือความละเอียดหรือความถูกต้อง (accuracy) ด้านตำแหน่ง แต่เทคโนโลยี ณ ตอนนี้มีมากมายหลายอย่างด้วยกัน แล้วแบบไหนจะให้ค่าความถูกต้องดีที่สุดหรืออาจจะไม่ละเอียดถูกต้องดีที่สุดแต่ประหยัดงบประมาณที่สุด ผมต้องออกตัวก่อนครับว่าไม่ใช่มืออาชีพในด้านนี้ เอาเป็นว่าแค่มือสมัครเล่น แต่อาศัยอ่านนิตยสารหรือตำราติดตามข่าวสารด้านนี้เป็นประจำ ยังไงๆจะลองมาเล่าสู่กันฟังครับ ก่อนจะไปต่อในรายละเอียดมาดูว่าแต่ละเทคโนโลยีมีความแตกต่างกันตรงไหนบ้าง
GCPs (Ground Control Points) คือจุดควบคุมภาคพื้นดินหรือเรียกง่ายว่าจุดบังคับภาพถ่าย นับว่าเป็นเทคโนโลยีเก่าแก่ควบคู่มากับการทำแผนที่ภาพถ่ายทางอากาศด้วยเครื่องบินสมัยแต่ก่อน (Analog photogrammetry) แผนที่ 1:50000 ที่เราใช้กันเมื่อก่อนก็เป็นผลพวงจากเทคโนโลยีนี้ ตั้งแต่บนเครื่องบินยังไม่มี GNSS กระบวนการทำแผนที่นี้มีขั้นตอนมากมายสำหรับการประมวลผลกว่าจะได้แผนที่มาใช้งาน และมีใช้ค่าใช้จ่ายสูงมาก ส่วนใหญ่จะจัดทำโดยหน่วยราชการ สำหรับโครงการขนาดใหญ่ หรือไม่ก็การจัดทำแผนที่ในระดับประเทศ
ปัจจุบันโดรนที่ทำงานภาพถ่ายทางอากาศ (Digital photogrammetry)
มีราคาที่ต่ำลงมากในปัจจุบัน ทำให้ชาวบ้านธรรมดาๆสามารถหาซื้อมาใช้งานได้ ส่งผลให้การทำแผนที่ภาพถ่ายทางอากาศได้รับความนิยมแพร่หลายเป็นวงกว้าง
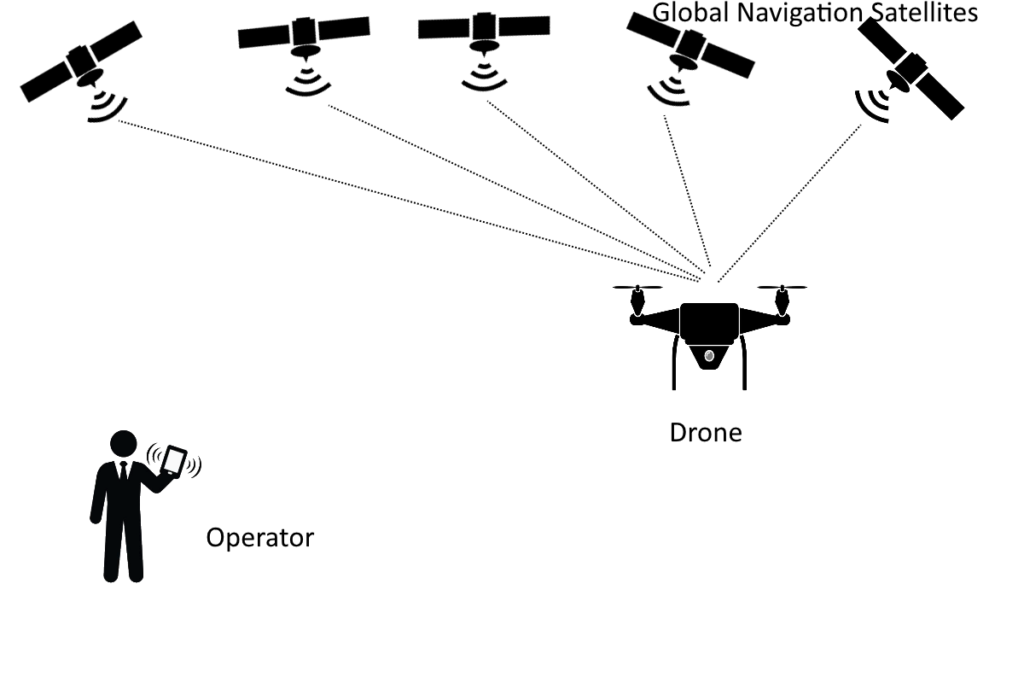
บนโดรนจะมี GNSS บนบอร์ดติดตั้งมาแล้วควบคู่กับกล้องถ่ายรูป ในขณะถ่ายรูปแต่ละรูปจะมีการบันทึกค่าพิกัดและระดับที่ได้จาก GNSS ในขณะนั้น แต่ความละเอียดของตำแหน่งและระดับยังหยาบมากในระดับบวกลบ 10 เมตร จึงทำให้ไม่สามารถนำมาใช้สำหรับงานแผนที่ได้ จึงต้องอาศัย GCPs (Ground Control Points) จากภาคพื้นดิน เป็นตัวมาช่วยบังคับทำให้ค่าพิกัดและค่าระดับอยู่ในขั้นที่ยอมรับได้
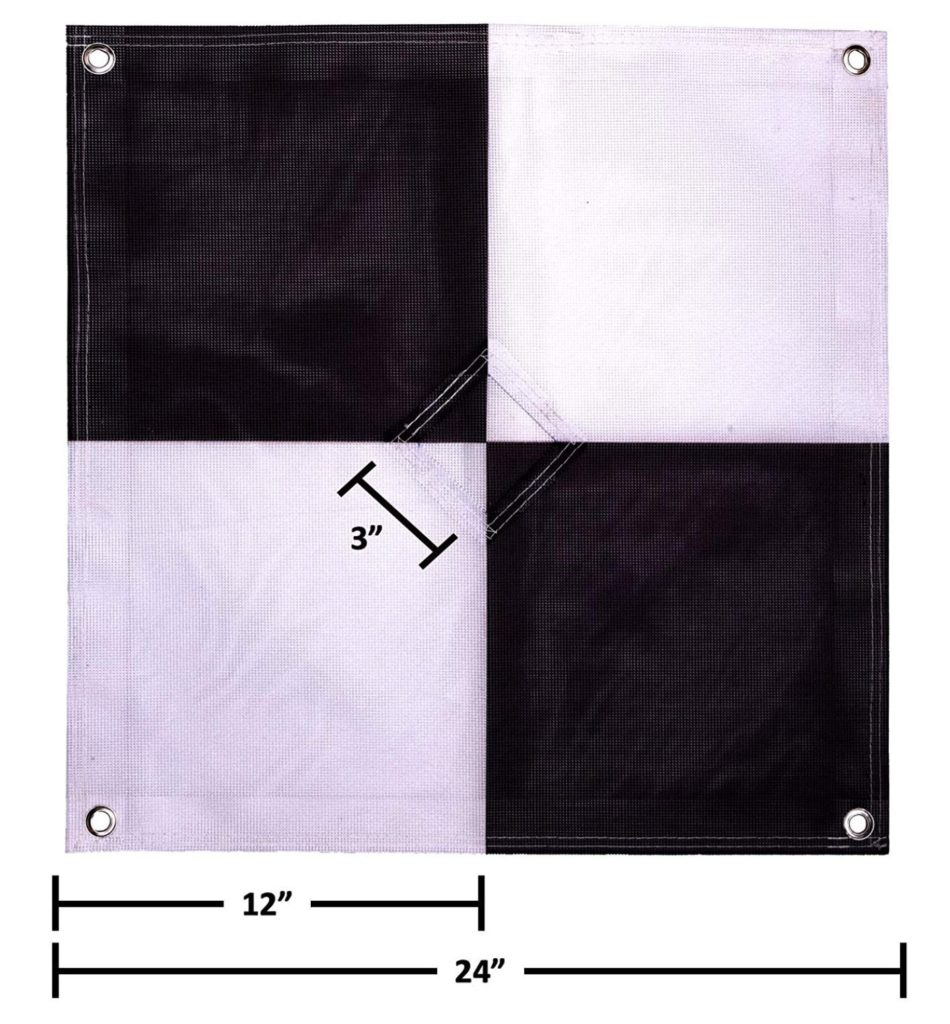
การทำ GCPs มีอยู่สองแบบคือแบบแรกเอาทำเครื่องหมายไว้ก่อนการบิน (Pre-marking) และแบบที่สองคือใช้หมายตามธรรมชาติที่มีอยู่แล้วแต่ต้องมาจำแนกจากรูปถ่าย แบบแรกจะได้ความละเอียดดีกว่า ตัวอย่างการทำเครื่องหมายก่อนการบินได้แก่ ไประบายสีบนพื้นคอนกรีต ถนน หรือไม่ก็มีเครื่องหมายสำเร็จรูปไปวางไว้เช่นวางไว้บนหลังคาบ้าน

ส่วนการเก็บค่าพิกัดและระดับของจุดบังคับภาพถ่ายจะต้องอาศัยการสำรวจรังวัดภาคพื้นดินอาจจะด้วยวิธีดั้งเดิมเช่นใช้กล้อง total station และกล้องระดับ ส่วนสมัยใหม่อาจจะใช้ RTK การใช้วิธีดั้งเดิมจะมีค่าใช้จ่ายที่สูงกว่าเนื่องจากใช้เวลามากและจำนวนคนมากกว่า
ขั้นตอนต่อไปคือการนำภาพและข้อมูลควบคุมภาคพื้นดินมาประมวลผลภาพถ่ายทางอากาศด้วยโปรแกรมจำพวก UAS-Based Photogrammetry แปลเป็นไทยพออนุมานได้ว่า โปรแกรมประมวลผลภาพถ่ายทางอากาศจากอากาศยานไร้คนขับ
อย่างไรก็ตามเนื่องจากการทำ GCPs นั้นต้องใช้ค่าใช้จ่ายและเวลาที่มาก ดังนั้นจึงมีวิธีการอื่นที่จะมาลดค่าใช้จ่ายตรงนี้ มาดูกันว่าวิธีไหนจะเข้าวิน
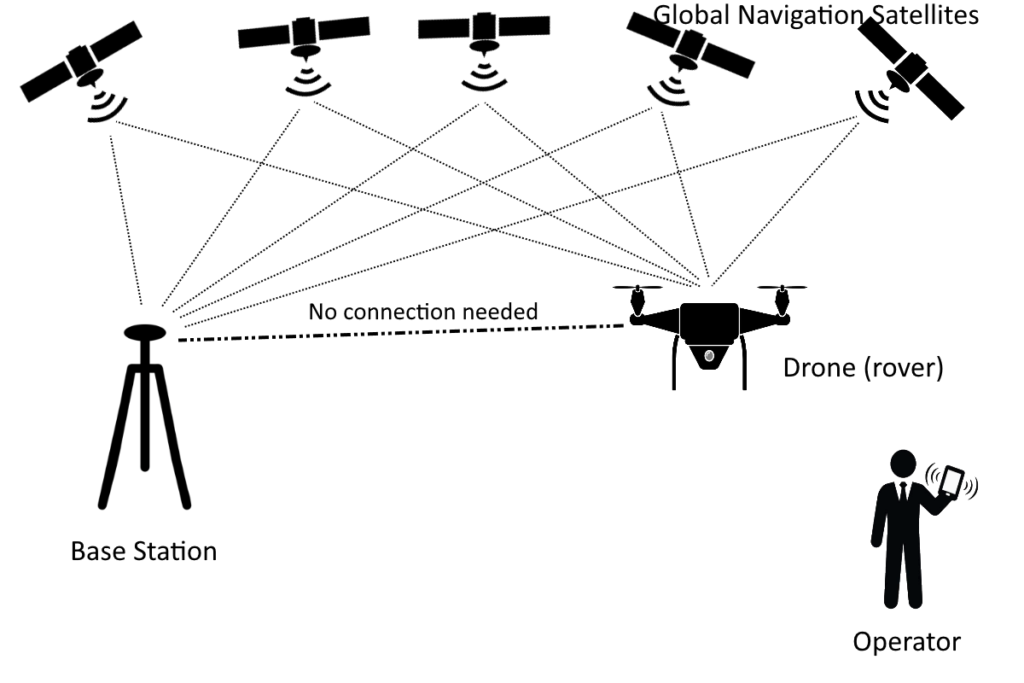
หลักการของ PPK คือนำไฟล์ข้อมูลล๊อก (Rinex logs) ของ GNSS บนโดรนตามเส้นทางการบินและไฟล์ข้อมูลล๊อก GNSS บนสถานีฐาน (Base station) ทั้งสองชุดมาทำการประมวลผลข้อมูล ผลลัพธ์ที่ได้จะได้ความละเอียดด้านตำแหน่งขอวแนวการบินประมาณ 2-3 ซม.
โดรนส่วนใหญ่ที่สามารถนำมาใช้แบบ PPK ได้จะเป็นตัวที่บอร์ดสามารถรับได้สองความถี่เป็นอย่างน้อย (L1 และ L2) แต่ความถี่เดียวก็ใช้ได้แต่ต้องรุ่นที่สนับสนุนโดย RTKLib สามารถไปอ่านโพสต์เก่าของผมได้
https://www.priabroy.name/archives/2098
ปัจจุบันเห็น emlid ทำบอร์ดมาขายในราคาที่ถูกมากๆ การใช้งาน PPK นอกจาก GNSS บอร์ดจะสามารถล๊อกข้อมูล (Rinex logs) เก็บลงไฟล์ในขณะบินแล้ว ยังต้องการสถานีฐาน (Base station) เช่นสถานีพวก CORs แต่บ้านเราประเทศไทย มีแต่ของกรมที่ดินไม่แน่ใจว่าจะให้บริการด้านนี้หรือไม่ ดังนั้นอาจจะต้องลงทุนตั้ง GNSS บนสถานีฐานเองบนหมุดที่ทราบค่าพิกัดและระดับ ซึ่งเช่นเดียวกันของ emlid ก็ทำมาขายในราคาถูกๆในระดับราคาสามหมื่นบาทต้นๆ
จากการประมวลผลเมื่อได้ค่าพิกัดแนวการบินของโดรนที่ได้ความละเอียดถูกต้องสูงด้านตำแหน่ง จะนำมามาเขียนลงไฟล์รูปที่ถ่ายโดยโดรนในขณะนั้น (Geotag) ตามเวลาที่บันทึก (timestamp) แทนตำแหน่งเดิมที่ได้จาก GNSS บนบอร์ด จากนั้นนำรูปถ่ายมาประมวลผลโปรแกรมพวก UAS-Based Photogrammetry
ลักษณะการใช้งาน RTK จะมีหลักการคล้ายกับ PPK คือต้องมีสถานีฐาน แต่สิ่งที่เพิ่มมาคือต้องมีระบบวิทยุเชื่อมโยงระหว่างสถานีฐานและโดรน นั่นก็หมายความว่าบนโดรนต้องมีวิทยุที่สามารถรับค่าปรับแก้ด้านตำแหน่งที่มีความถูกต้องสูงจากสถานีฐานตลอดเวลาที่ทำการบินในการสำรวจ ตำแหน่งที่ถูกต้องจะถูกนำไปเขียนในไฟล์รูปถ่าย (Geotag)
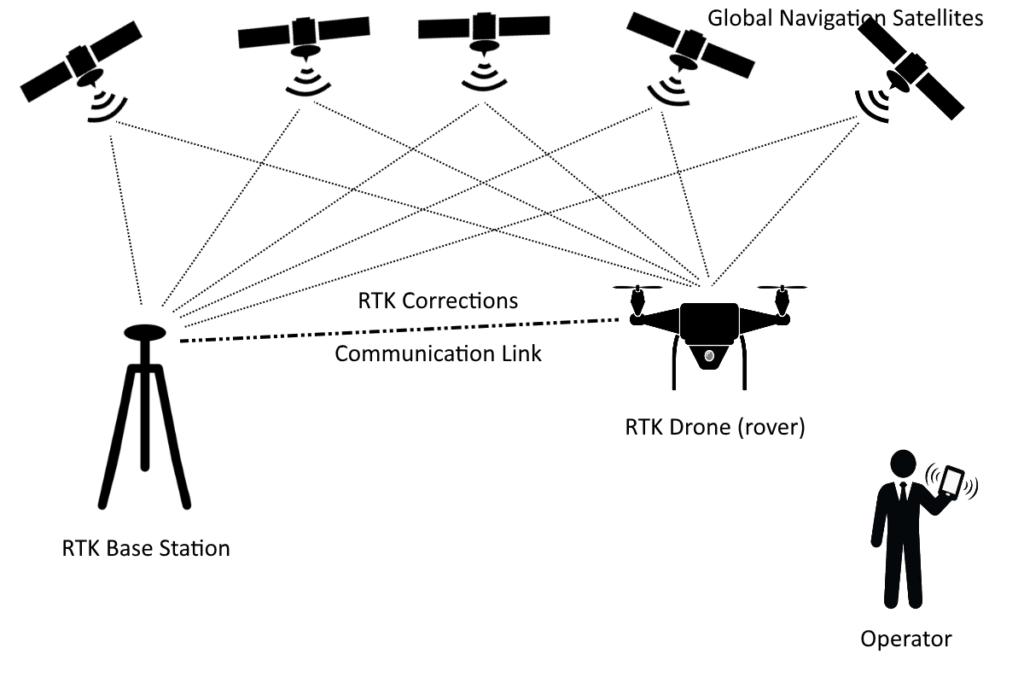
ข้อเสียระบบนี้คือสัญญานวิทยุจะต้องติดต่อกันได้ตลอดเวลา ถ้าเกิดหลุดเช่นมีอาคารหรือต้นไม้มาบังแนวคลื่นวิทยุ หรือแม้แต่การกลับลำแนวบินของโดรนที่อาจจะมีผล ข้อมูลตรงนั้นจะใช้ไม่ได้เลย นอกจากน้ำหนักที่เพิ่มขึ้นจากระบบวิทยุแล้วแล้ว ยังต้องการแบตเตอรีมาป้อนวิทยุ ทำให้ระยะเวลาการบินของโดรนสั้นลง
หลักการของไลดาร์คือการวัดระยะทางจากการใช้วิธียิงแสงเลเซอร์ออกไปแล้ววัดการสะท้อนกลับมาว่าวัตถุนั่นอยู่ไกลแค่ไหน การยิงแสงเลเซอร์เป็นลักษณะการกวาดแบบเรดาร์คลื่นวิทยุ แต่มีความละเอียดสูงมากกว่ามาก
เนื่องจากเทคโนโลยีที่ทันสมัยทำให้ขนาดของไลดาร์มีขนาดเล็กลงมาตามลำดับ จนมีราคาถูกลงและสามารถนำมาติดตั้งบนโดรนได้ จึงทำให้เกิดลูกผสมการบินด้วยโดรนถ่ายภาพจากกล้องถ่ายรูปก็ได้ เก็บพื้นผิวภูมิปรเทศเป็นสามมิติจากจุดจำนวนมากด้วยการสแกนของไลดาร์ ส่วนระบบการให้ตำแหน่งนั้นอาจจะใช้แบบ PPK หรือ RTK มาช่วยให้พิกัดมีความละเอียดถูกต้องมากยิ่งขึ้นหลักการคล้าย Aerial Photogrammetry คือตำแหน่งของโดรนในขณะนั้นจะถูกแปลง (Trajectory) ไปยังจุดของลำเลเซอร์ที่ตกกระทบวัตถุ ทำให้ได้ point cloud ที่มีค่าพิกัดและระดับ
ปัจจุบันมีแนวโน้มที่โดรนไลดาร์จะมีผู้ผลิตมาขายมากขึ้น ตามแนวโน้มที่เครื่องไลดาร์มีขนาดและราคาลดลง ส่วนผู้ที่จะซื้อมาใช้ก็เป็นไปตามกำลังทรัพย์ ถึงจะถูกลงแต่ไม่ใช่หลักหมื่นเหมือนโดรนถ่ายรูป การประมวลผลบางรุ่นสามารถสำรวจภาพถ่ายทางอากาศและไลดาร์สแกนควบคู่ไปด้วยกัน (Pixel and Point)


แนวโน้มของงานทำแผนที่ด้วยภาพถ่ายด้วยสามวิธีนี้ ดูเหมือนในวงการค่อนข้างจะเทมาที่ PPK เพราะสะดวกใช้งบประมาณและระยะเวลาน้อยกว่าแบบ GCPs ความถูกต้องด้านตำแหน่งดีใกล้เคียงกับ RTK แต่มีความเสถึยรและแน่นอนดีกว่า RTK ที่เสียงกับสัญญานหลุดในระหว่างการบินสำรวจ แต่อย่างไรก็ตาม GCPs นี้ก็ขาดไม่ได้สำหรับงานตรวจสอบคุณภาพ (check point)
ถ้าทำแผนที่ภาพถ่ายทางอากาศถ้าให้ได้ผลลัพธ์ระดับเทพนั้น ว่ากันว่าต้องใช้เครื่องบินแบบปีกแข็งเท่านั้น แต่เนื่องจากความยากในการบิน ราคาแพงกว่าแบบใบพัด ใช้พื้นที่ที่มากกว่าสำหรับส่งเครื่องบินขึ้นสู่ท้องฟ้าทำให้ขายดีสู้แบบใบพัดโรเตอร์ไม่ได้ แต่ที่ว่ากินขาดคือความนิ่งเมื่อเจอกระแสลมแรงและที่สำคัญคือใช้แบตเตอรี่น้อยกว่าเพราะปีกสามารถยกตัวได้เมื่อกระแสลมผ่าน จึงบินได้นานกว่าทำให้การบินขึ้นแต่ละครั้งสามารถสำรวจพื้นที่ได้มากกว่า ข้อเสียดั้งเดิมคือการลงจอดนั้นต้องอาศัยทักษะร่อนลงพอสมควร ปัจจุบันมีร่มชูชีพจะสั่งให้กางแล้วลงมาก็ยังได้ ผมเห็นในคลิปตอนร่อนลงจอด ก่อนจะถึงพื้นคนบังคับวิ่งมาอุ้มรับ

ข้อดีของแบบใบพัดคือต้องการพื้นที่ในการบินขึ้นลงน้อย บังคับง่าย การเลี้ยวเข้าแนวสามารถทำได้ในวงแคบ เพราะสามารถเคลื่อนไหวได้ทุกทิศทาง สามารถขนของได้มากกว่า (payload) ขนาดกระทัดกว่าถ้าสามารถพับปีกเก็บได้ก็จะยิ่งเล็กสะดวกในการขนย้าย ราคาถูก ข้อเสียคือไม่นิ่งเมื่อเจอกระแสลมแรงๆ เนื่องจากต้องใช้มอเตอร์ในการขับใบพัดหลายอัน ทำให้กินแบตเตอรี่มากและไม่มีปีกสำหรับช่วยในการยกตัว

ผมเห็นต้องทึ่งอึ้งกับไอเดียบรรเจิดนี้ จะเป็นยังไงถ้าจุดบังคับภาคพื้นดินมี GNSS บอร์ดติดอยู่ในตัว สามารถหาตำแหน่งตัวเองได้ วางหลายๆตัวสามารถปรับแก้เป็นเน็ตเวิร์คและสามารถนำข้อมูลนี้ไปประมวลผลใน cloud platform ได้ มีแบตเตอรี่ในตัวสามารถชาร์จได้จากโซล่าเซลล์ในตัวได้ถ้ามีแสงแดด
วิธีการ PPK และ RTK ล้วนต้องการแผนที่ภาพถ่ายที่ถูกต้องด้านตำแหน่งสูงขึ้น โดยที่เน้นลดจำนวนจุด GCPs ลง (เหลือเป็นแค่จุด check point ไม่กี่จุด) แต่วิธีการนี้กลับตรงข้าม เอา GCPs อัจฉริยะไปวางให้ทั่วหน้างานที่จะบิน กดปุ่มให้มันทำงาน แล้วเอาโดรนบินเก็บข้อมูล
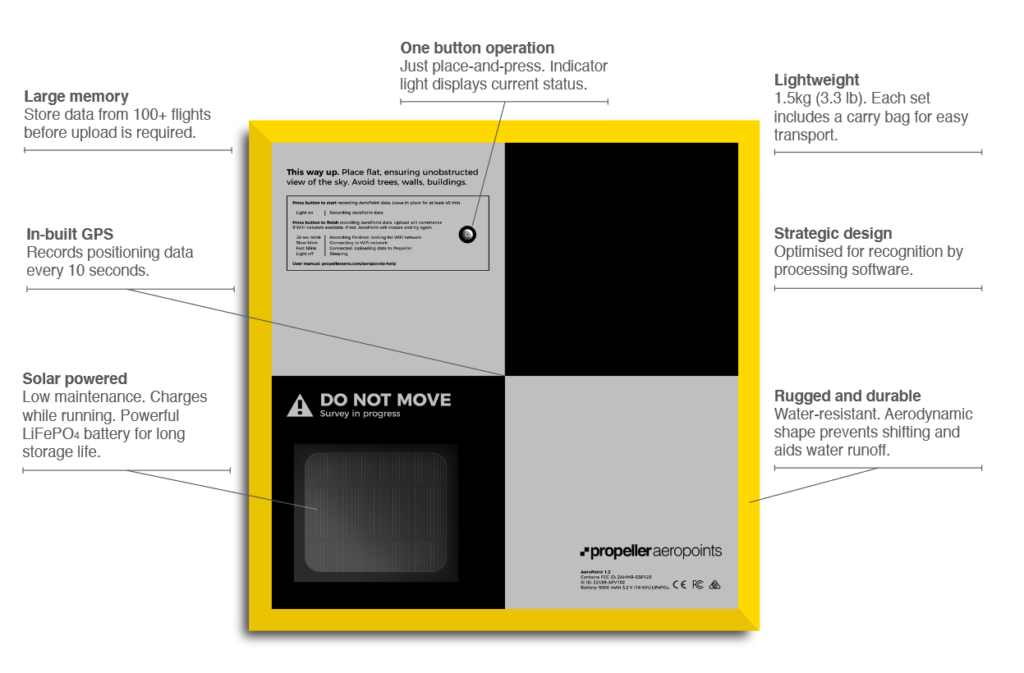

สำหรับรูปตัวอย่างที่ผมเอาให้ดูนั้นเป็นงานของ Propeller ที่ร่วมกับ DJI และ Trimble เรียกตัวจุดบังคับภาพถ่ายพื้นดินว่า Aeropoint ดูจากโบรชัวร์แล้วการใช้งานต้องเชื่อมต่อกับ cloud platform ของบริษัทในการประมวลผล การให้ค่าพิกัดสามารถเลือกได้ 6 วิธี หนึ่งในวิธีนั้นคือนำไปวางบนหมุดที่ทราบค่าพิกัดทำหน้าที่เป็น Base Station แล้วนำมาคำนวณ PPK ทีหลังแบบลูกผสม ก็ติดตามดูกันต่อไป ว่าจะมีบริษัททำมาแข่งขันกันบ้าง สนนราคาของตัวนี้ขายเป็นชุดชุดละ 10 ตัว ประมาณสองแสนบาท เฉลี่ยแล้วตัวละสองหมื่นบาท ก็ไม่ถือว่าแพงจนเกินไป
แนวโน้มของปัญญาประดิษฐ์โดยการเทรนให้คอมพิวเตอร์โปรแกรมเรียนรู้จากการป้อนข้อมูลตัวอย่าง ในวันนี้เทคโนโลยีตัวนี้ได้มาถึงแวดวงงานประมวลผลภาพถ่ายจากโดรน ตัวอย่างงานได้แก่การแยกแยะจำแนกภาพออกมาได้แก่สิ่งปลูกสร้าง พืชพรรณต่างๆ สามารถลดแรงงานคนไปได้มหาศาล การประมวลผลแบบนี้ส่วนใหญ่ต้องผ่าน cloud platform เนื่องจากต้องการการประมวลผลจากคอมพิวเตอร์ที่เร็วจากฝั่งเซิฟเวอร์ผู้ให้บริการ
สวนใหญ่เรายังเห็นโดรนใบพัดบินได้เต็มที่ประมาณ 30-40 นาที ส่วนปีกแข็งสามารถบินได้ประมาณ 1 ชม. ในอนาคตอาจจะมีเทคโนโลยี่ของแบตเตอรี่ที่ดีขึ้น น้ำหนักเท่าเดิมแต่ประจุไฟฟ้าได้มากกว่าเดิม โดรนสามารถบินได้นานกว่าเดิม ผู้ผลิตโดรนบางรายสามารถทำให้โดรนกันน้ำได้ บินในขณะฝนตกได้ หรือบางรายเอาโดรนมุดลงไปดำใต้น้ำก็มี แต่สำหรับงานทำแผนที่แล้ว เอาแค่กันน้ำก็พอ
ราคาของโดรนถูกลงแต่ประสิทธิภาพดีขึ้น และราคาซอฟท์แวร์ประมวลผลก็ถูกลงเช่นดัน ส่วนการใช้การประมวลผลแบบบนคลาวด์ก็ถูกลงเช่นกัน แต่ให้ระลึกไว้อยู่เสมอการทำแผนที่ภาพถ่ายด้วยโดรนนั้น ราคาของโดรนคือส่วนที่ถูกที่สุดของกระบวนการนี้ ถ้าใช้คอมพิวเตอร์คำนวณเองแทนที่จะส่งไปคำนวณในคลาวด์ แน่นอนเครื่องคอมพิวเตอร์ต้องสเป็คสูงมาก
เมื่อมีความต้องการใช้งานมาก อาจจะมีบริการให้ช่าโดรนเหมือนรถยนต์ ข้อดีคือผู้ใช้ไม่ต้องแบกค่าใช้จ่าย สามารถเช่ารุ่นใหม่มาใช้งานได้ตลอดเวลา
ในอนาคตจะมีการตรากฎหมายเกี่ยวกับใช้งานโดรนเข้มงวดมากขึ้นเพื่อความปลอดภัยต่อสาธารณะ โดรนจะต้องมีหมายเลขใบอนุญาตอยู่ที่ตัวเครื่อง สามารถตรวจสอบว่าใครเป็นเจ้าของได้ การบินไม่สามารถปล่อยไปไกลได้ต้องอยู่ในสายตา (Line of sight) เสมอ